























































US-based Schilling Robotics’ ‘remote systems engine’ is a cornerstone in maintaining the firm’s strong position as a specialist designer and manufacturer of remotely operated equipment for underwater environments.
The Remote Systems Engine is a set of modular building blocks for underwater propulsion, actuation, control, and communication. The firm also created the well-known ‘Quest’, a turnkey electric work-class remotely operated vehicle (ROV) system, and is also a global supplier of telerobotic manipulator systems for ROVs and cable trenching machines used in offshore oil, telecommunications, scientific, and military operations.
When Alstom Schilling Robotics (ASR) developed its innovative Quest work-class ROV system, it looked principally to the oil and gas industry as its main market. The industry was undergoing a strategic expansion into progressively deeper waters and required a new generation of offshore tooling and equipment necessary to operate in depths to 4000m.
At the time, most ROV tasks were being carried out in considerably shallower depths by a wide range of vehicles. So big were the potential rewards of venturing into this deepwater frontier that many companies invested in increasing the depth limitations of their systems.
Alstom Schilling Robotics responded by virtually designing an ROV top-down to encompass the latest equipment, designs and cost effective strategies. The result was the Quest ROV. The investment almost immediately paid off with its acceptance by the industry and a contract for four such models from a major offshore contractors, Canyon Offshore.
Schilling Robotics also offers four standard manipulator systems (the Titan3, Conan, Orion, and RigMaster) with a wide range of functions, sizes, lift capacities, ranges of motion, control systems, and dexterity.
While Schilling Robotics’ emphasis is on products and projects for the subsea industry, the company’s products have also been accepted for a variety of terrestrial applications in government and commercial energy markets, and have earned a reputation for reliability and productivity. Radiation-hardened versions of Schilling manipulators are currently employed by nuclear power utilities and the US Department of Energy in applications ranging from nuclear environmental restoration and waste management to routine reactor maintenance and inspection.
Schilling Robotics’ main office is a 5,500 sq m facility located in Davis, California, USA. This facility emphasises space for operations in design, manufacturing, assembly, inspection, testing, training, and customer service. A regional office of 500 square meters is located in Aberdeen, UK. The Aberdeen facility contains space for spare parts inventory, training, and equipment evaluation, maintenance, and repair.
Remote Systems Engine
Their products provide their customers with the latest, most capable technology available. “We understand that quality and reliability are what matters, and they deliver” claims the firm.
The performance and reliability of their telerobotic manipulator systems has made them the first choice for some of the world’s premier oil and gas companies and their service companies. With the recent introduction of their Remote systems engine, they have the goal of raising the bar to the same level for subsea control systems.
The Remote systems engine (RSE) from Schilling Robotics is a simple, reliable, and powerful suite of equipment and control software used to perform generic remote systems functions.
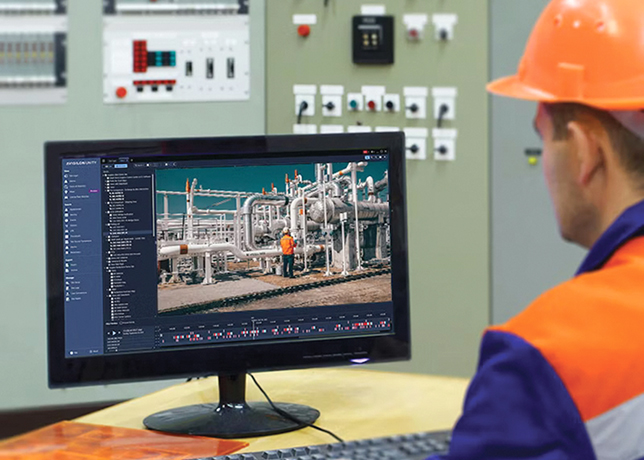
These functions include: Instrument signal acquisition, handling, and logging; video acquisition, recording, and editing; power conditioning and distribution; tool operation and feedback; actuation (electric and hydraulic); electric propulsion; hydraulic valving and compensation.
RSE components can be used on a wide range of remotely operated submersible systems, including subsea process equipment, wellhead management systems, electrical power conversion systems, ROVs, ROTs, trenchers, and plows. Schilling Robotics’ electric work-class QUEST ROV is an example of a complete remote intervention system constructed from RSE components.
Schilling products can be seen across the world in a host of global application, for example Oceaneering International are one of their largest manipulator customers. Their Orion, Conan, Titan 3, and Rigmaster manipulators are installed as standard equipment on many of Oceaneering’s medium and heavy work-class ROV systems. Stolt Offshore are also a major customer, using their Titan 3, Rigmaster, and Orion manipulators extensively on their fleet of ROVs. Tyco also currently have 13 Orion manipulators in operation on their fleet of cable maintenance vehicles.
The firm has also recently received a patent for its SeaNet cable/connector, which provides a robust, reliable connection to electrical power and telemetry for a wide range of remotely operated devices, including sensors, cameras, lights, thrusters, actuators, and tools.
SeaNet cables, which have a connector at either end, are actively pressure-balanced and oil-filled, and are almost neutrally buoyant in seawater. Spring-loaded contacts on the connector ensure that the connection is always sound, and the cables can be disconnected only when two tabs on the connector head are simultaneously pressed.
Each cable contains seven conductors, two for power, one for ground, and four for signals. (Typically, two signal conductors are used for video and two for data transmission.) The power and signal channels are easily monitored using the bright LED status indicator lights that show through a window in the connector head.
The connector head has an incorporated integral perimeter lip seal that is not vulnerable to damage during installation and does not use an O-ring that could be lost or damaged. A fluid check valve in the connector face prevents leakage of compensation fluid when the cables are disconnected.
Cable penetrators (mating connectors) can adapt the SeaNet cable/connector assembly to virtually any control system and any device requiring telemetry or power. The penetrator’s electrical traces are a series of concentric circles, allowing an unlimited number of clocking positions for the cable. The penetrator can either allow or exclude the flow of compensation fluid into the device. If it is not possible to install a SeaNet penetrator in an instrument or tool (as in a rental device that cannot be modified), a SeaNet adapter is available to provide an interface to the SeaNet cable/connector.


